Développement d'une plateforme robotique pour la radiothérapie guidée par l'image
Objectif
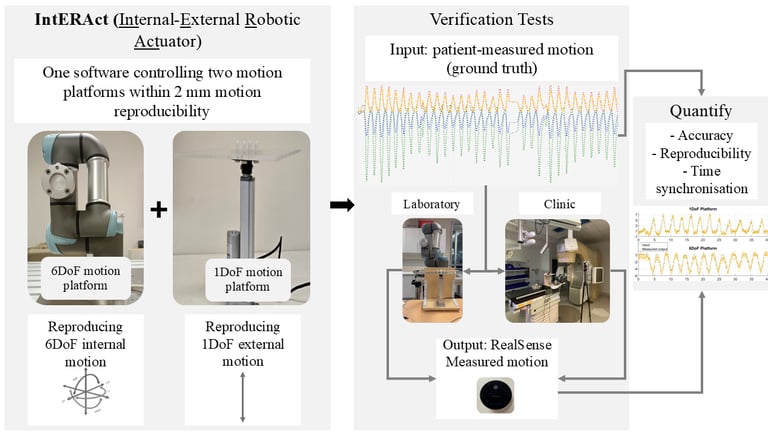
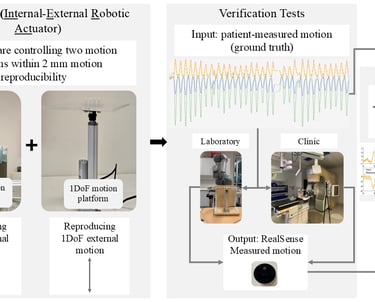
Développement de plateformes robotiques innovantes pour la radiothérapie guidée par l’image : l’une reproduit les mouvements respiratoires, l’autre simule les déplacements internes de la tumeur. Synchronisées, elles recréent les conditions réelles de traitement afin d’améliorer la fiabilité, la sécurité et l’optimisation des protocoles thérapeutiques.


Contexte
La radiothérapie guidée par l’image (IGRT) améliore la précision des traitements en ajustant en temps réel le faisceau sur la tumeur. Mais les mouvements physiologiques (respiration, activité cardiaque) compliquent ce ciblage et peuvent réduire l’efficacité des séances. Les systèmes existants de suivi et de compensation sont souvent coûteux, complexes ou limités. D’où la nécessité de concevoir une plateforme robotique capable de reproduire fidèlement ces mouvements pour renforcer le contrôle qualité et faciliter l’intégration de l’IGRT en pratique clinique.
Méthodologie
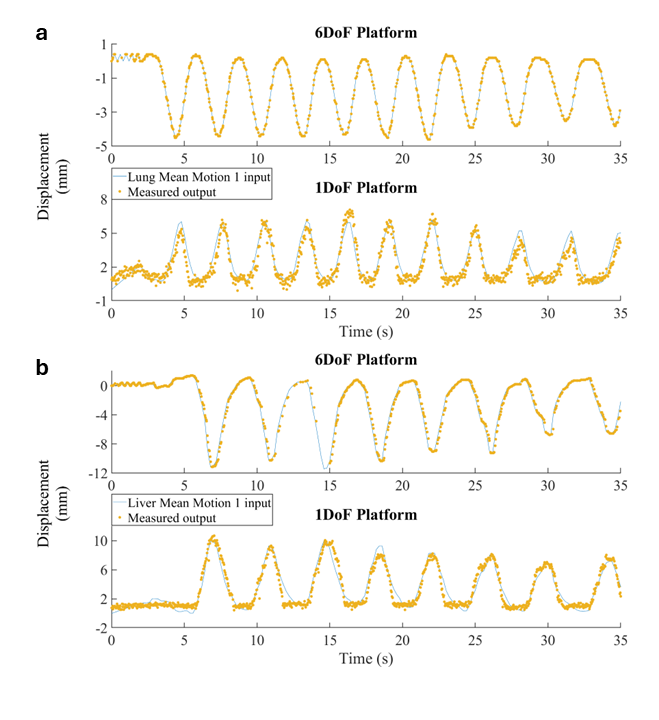
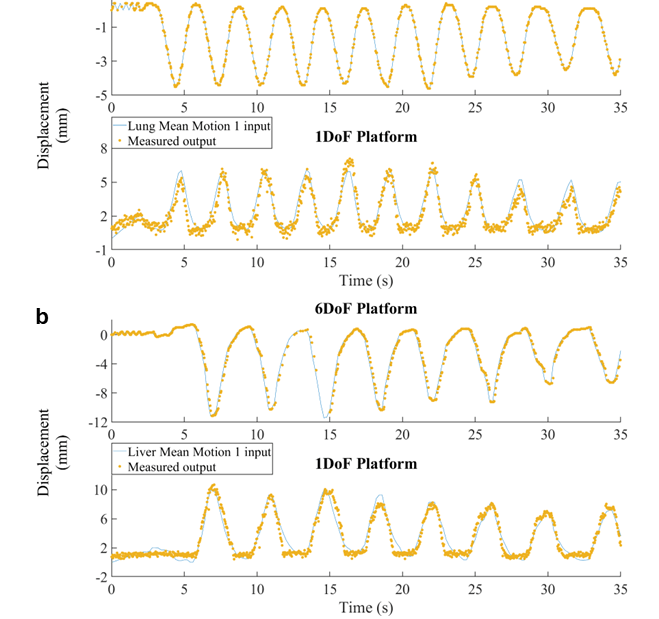
La méthodologie s’appuie sur deux plateformes robotiques complémentaires : une plateforme linéaire reproduisant les mouvements respiratoires et un bras robotisé à six degrés de liberté simulant les déplacements internes des tumeurs. Synchronisés, ces dispositifs recréent les conditions réelles observées en clinique. Après conception, intégration et développement du logiciel de contrôle, les tests en laboratoire puis en environnement clinique ont montré une précision submillimétrique et une latence inférieure à 0,1 seconde.
Plus d'informaiton : https://image-x.sydney.edu.au/6dof/